
学习深度相机(2): OrbbecViewer的安装和使用
前一篇文章中大致介绍了奥比中光Femto Bolt相机,这篇文章我们就来具体使用一下这款相机的一些功能。
下载和安装OrbbecViewer和OrbbecSDK
根据官网文档,OrbbecSDK是Orbbec 3D 相机产品软件开发套件,全面支持 UVC,实现免驱动即插即用,提供低层和高层简单易用的 API,帮助开发者在不同场景下灵活使用。而OrbbecViewer是基于Orbbec SDK开发的示例工具,帮助开发者快速使用Orbbec的3D传感器产品。实现了 Orbbec 3D传感器产品的特性功能,包括读取序列号、获取设备类型、相机参数、控制等功能bec SDK开发的示例工具,帮助开发者快速使用Orbbec的3D传感器产品。实现了 Orbbec 3D传感器产品的特性功能,包括读取序列号、获取设备类型、相机参数、控制等功能。本次我们就来通过OrbbecViewer快速上手一下这款相机。
前往官方github地址下载
首先,访问OrbbecSDK的官方仓库(https://github.com/orbbec/OrbbecSDK)。前往其最新的Release页面。
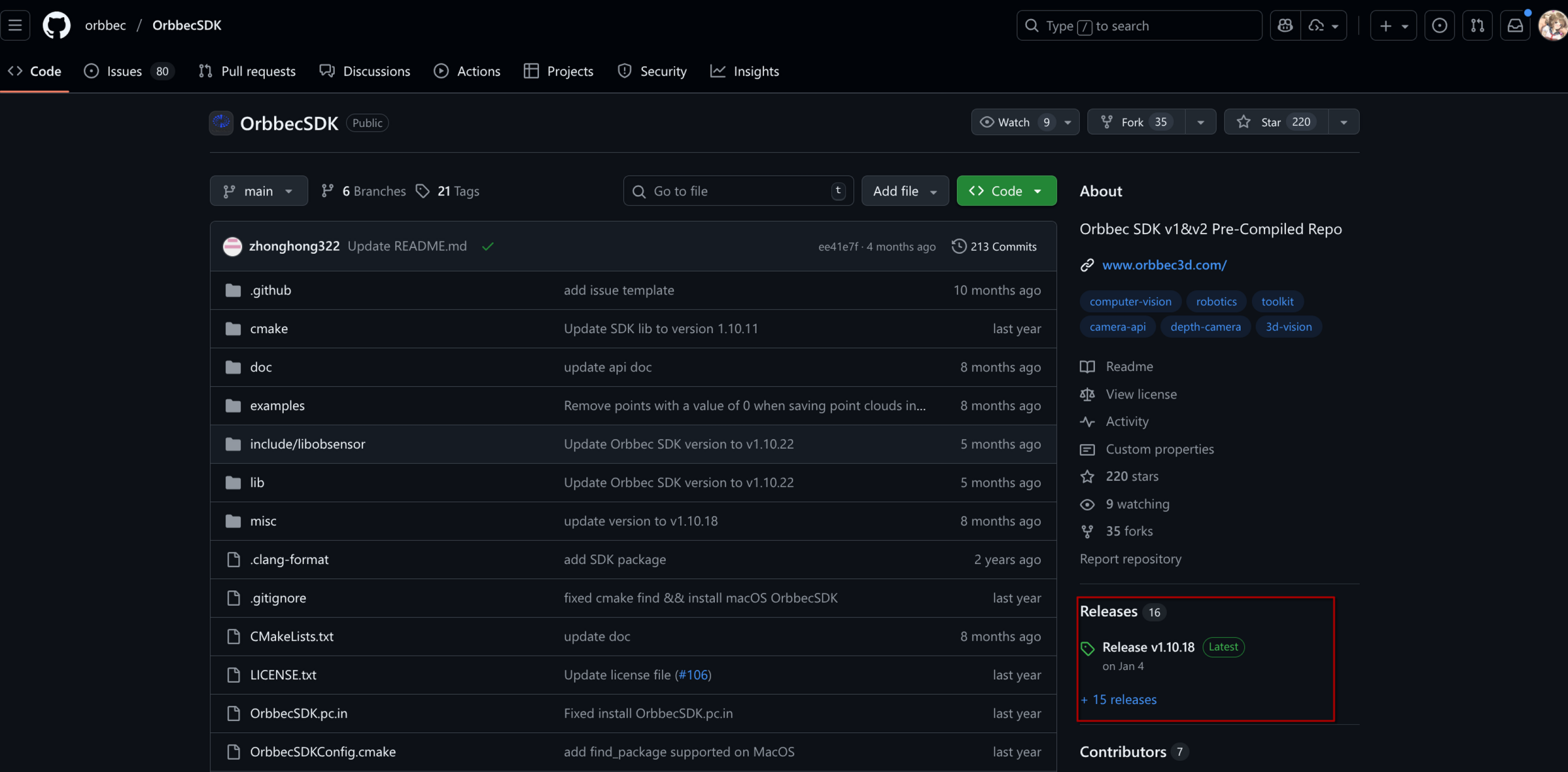
撰写这篇文章的时候,sdk的最新正式版为v1.10.18。
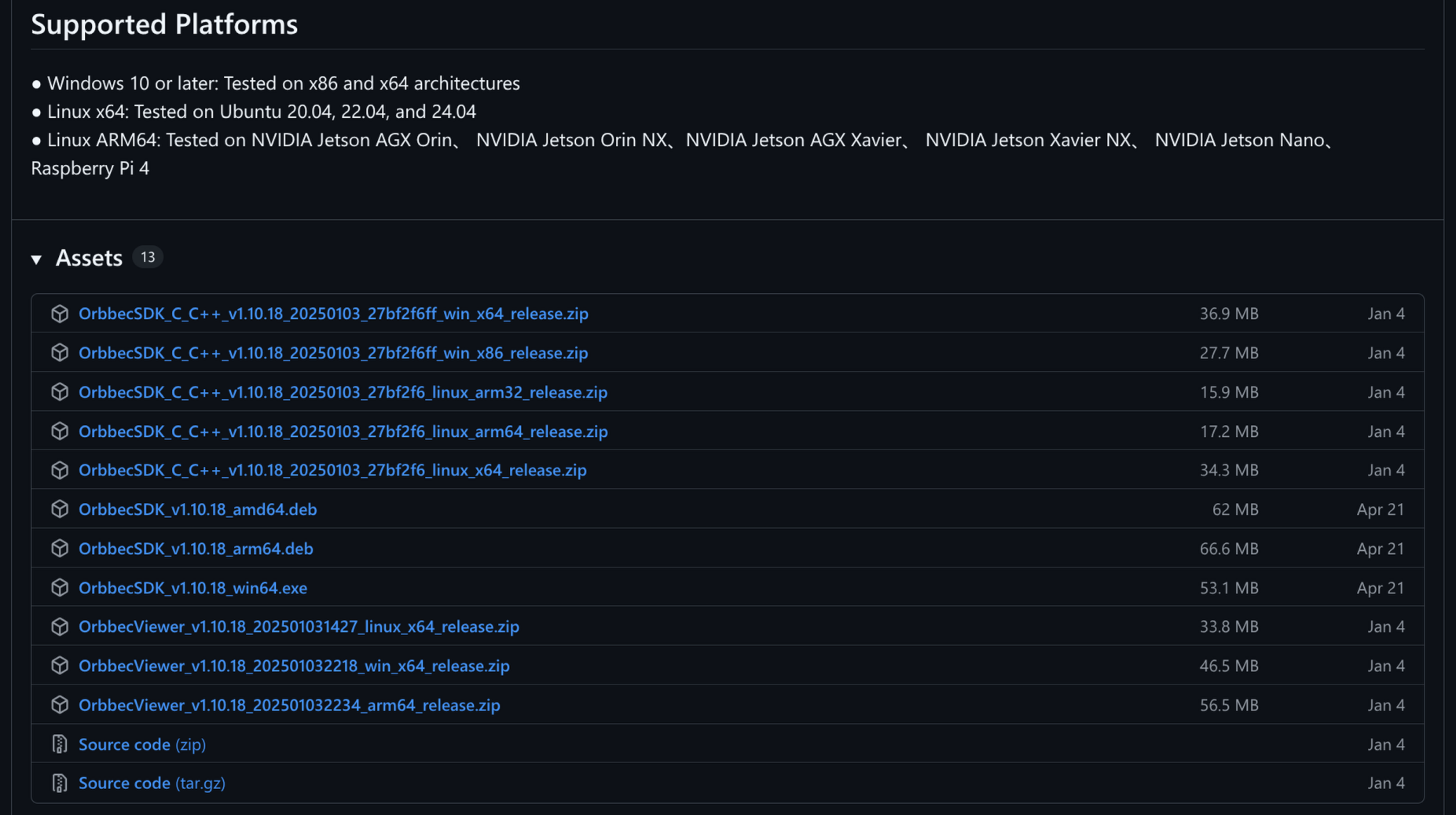 根据release信息,sdk是支持多平台的,甚至还支持Jenson Nano和树莓派这样的嵌入式平台。我们需要根据自己所在的平台下载对应的sdk和OrbbecViewer。由于笔者使用的是x86平台上的arch linux系统,所以就像选择后缀为linux_x64的版本的sdk和OrbbecViewer。注意到实际上sdk是提供了deb格式的安装包和exe的,如果你的平台是Ubuntu系统就直接下载deb包,是Windows就安装exe即可。
根据release信息,sdk是支持多平台的,甚至还支持Jenson Nano和树莓派这样的嵌入式平台。我们需要根据自己所在的平台下载对应的sdk和OrbbecViewer。由于笔者使用的是x86平台上的arch linux系统,所以就像选择后缀为linux_x64的版本的sdk和OrbbecViewer。注意到实际上sdk是提供了deb格式的安装包和exe的,如果你的平台是Ubuntu系统就直接下载deb包,是Windows就安装exe即可。
安装和使用OrbbecViewer
如果你是通过压缩包方式安装的话,直接解压然后进入OrbbecViewer所在文件夹即可。
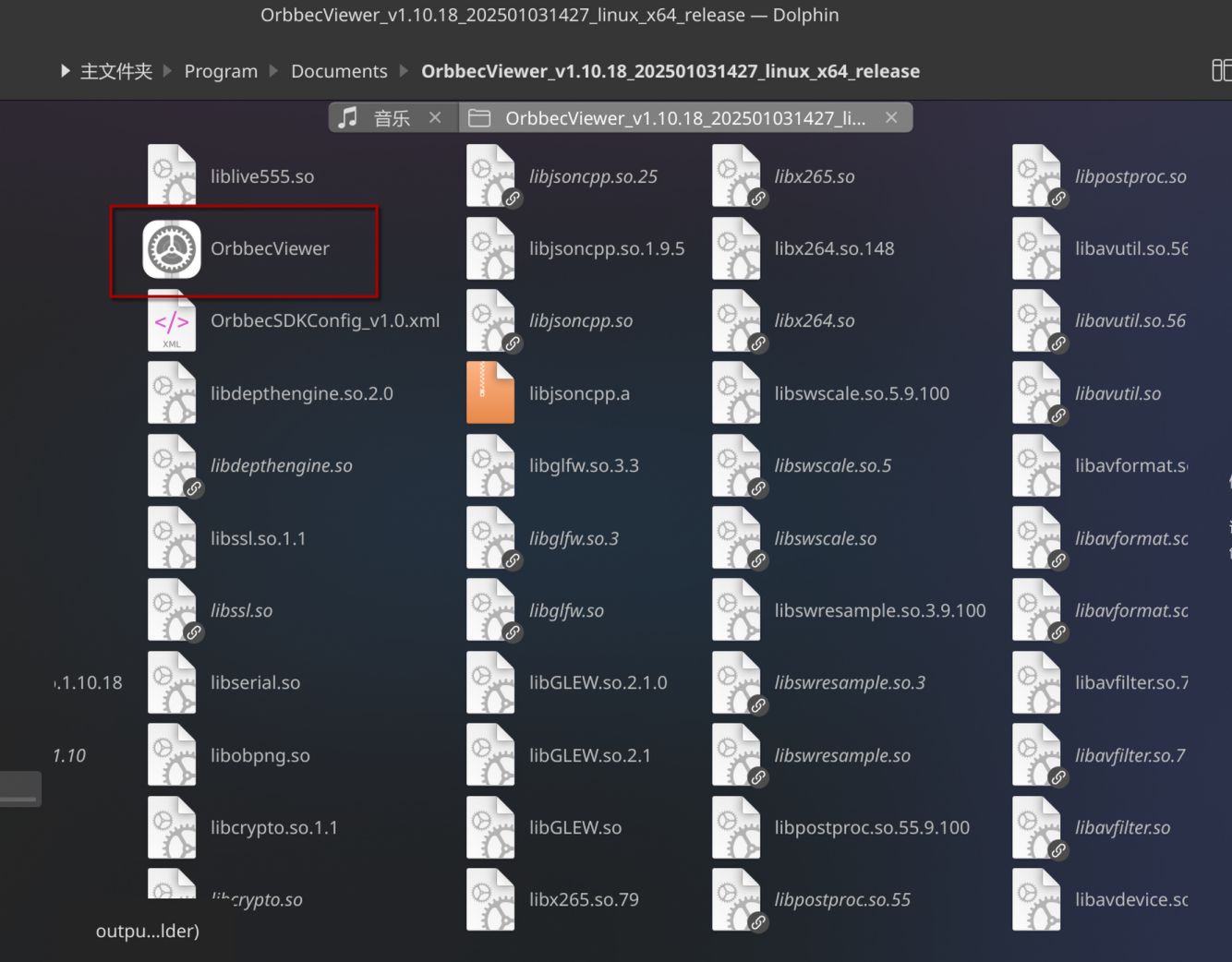
这里的OrbbecViewer就是我们的可执行文件。但是,如果在linux系统上,你直接双击打开是不能运行的。这是为什么呢?
我们安装软件的时候,一定要注意查看官方文档和说明:
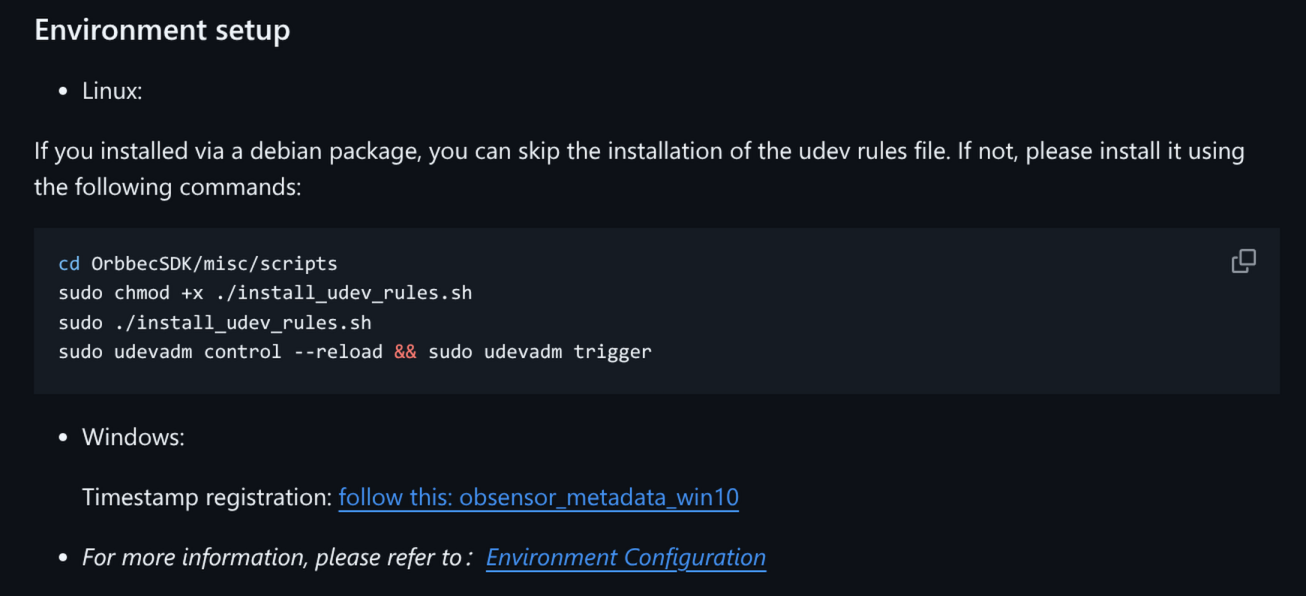
在项目的Readme中提到,如果你不是通过deb包安装的sdk(或者OrbbecViewer),就需要执行文件夹下script的脚本来让udev rules生效。这里我们先不管这是什么。在当前文件夹中打开终端,执行以下命令:
cd Script # 进入脚本目录
sudo chmod +x ./install_udev_rules.sh # 赋予脚本执行权限
sudo ./install_udev_rules.sh # 执行脚本安装Udev规则
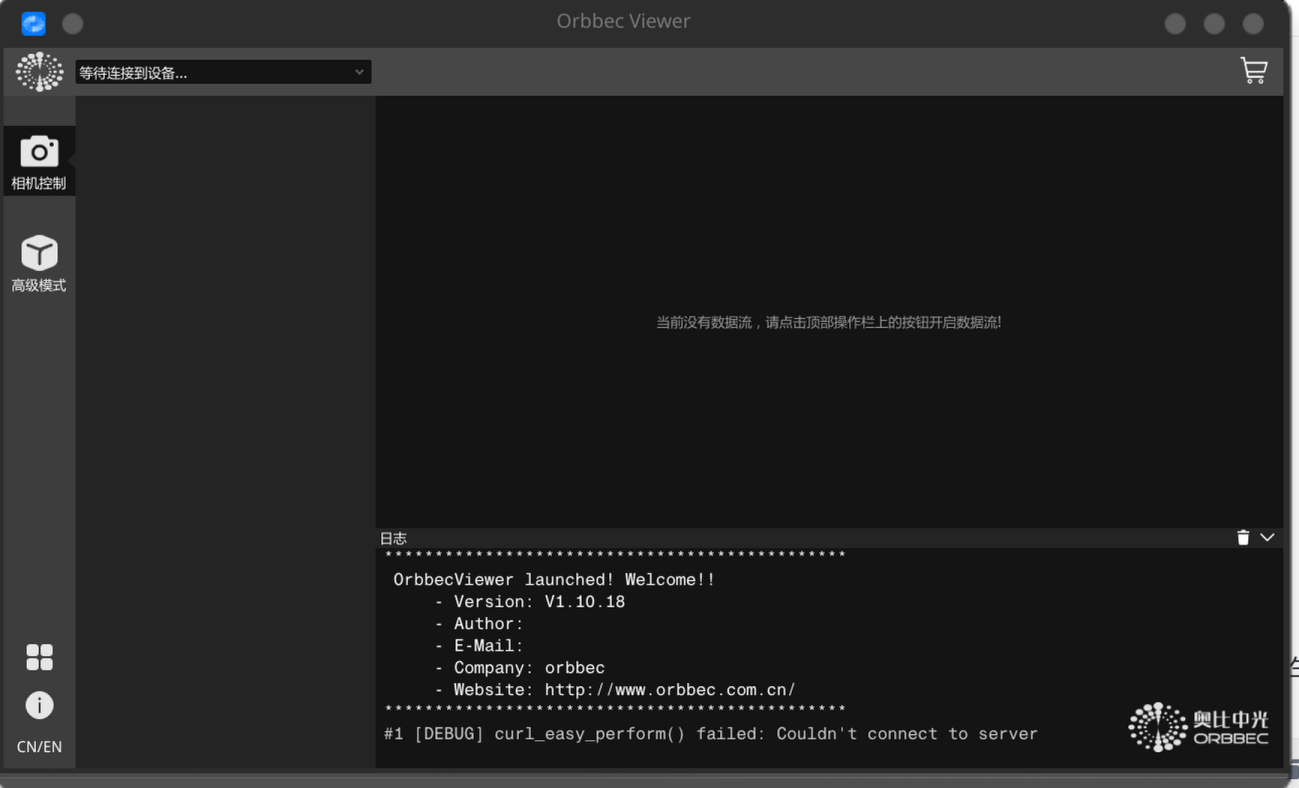
然后再打开软件就可以了,看到这样的界面就表示成功了。
这个时候我们通过包装附赠的USB-C线连接相机到电脑,再给相机插上电源。当指示灯为白色常亮的时候,就代表连接成功了(注意,如果只插USB线,则相机指示灯会橙色快闪,如果白色快闪,那么就是USB线连接有问题)
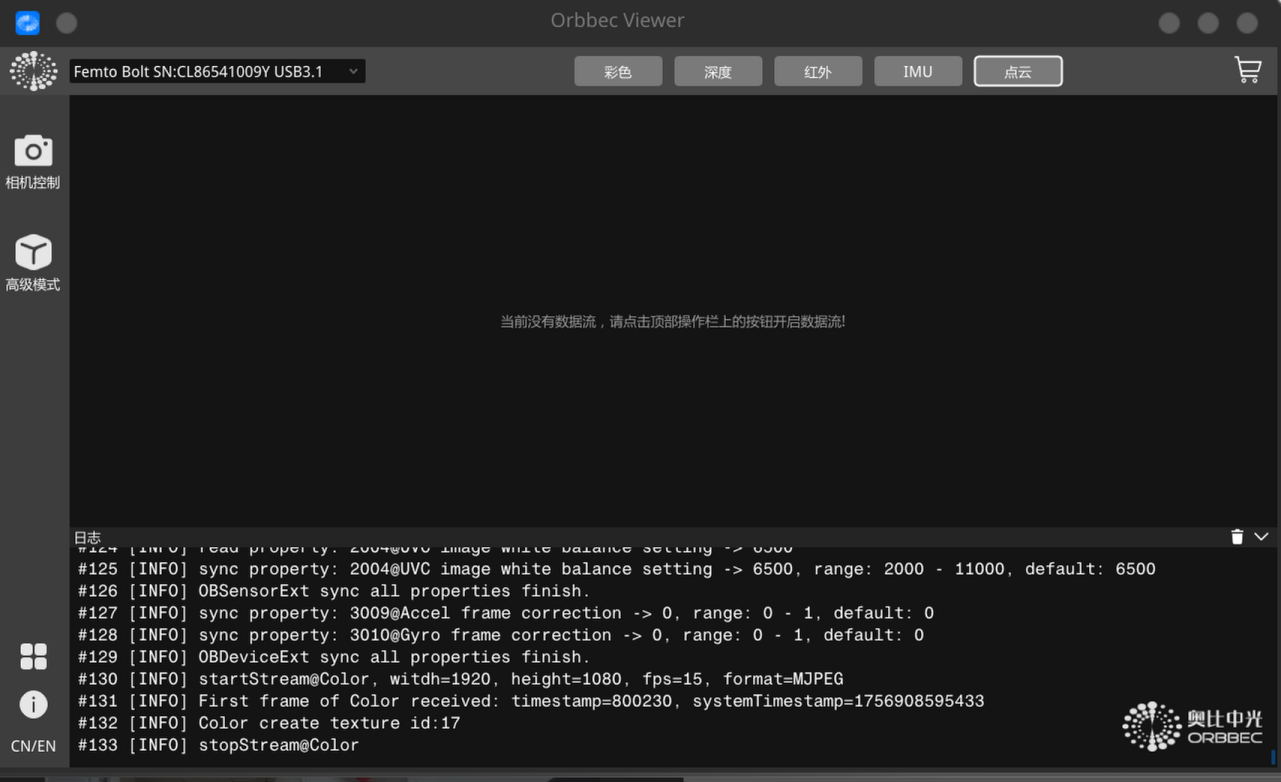
此时右上角就会显示已经连接的设备型号。
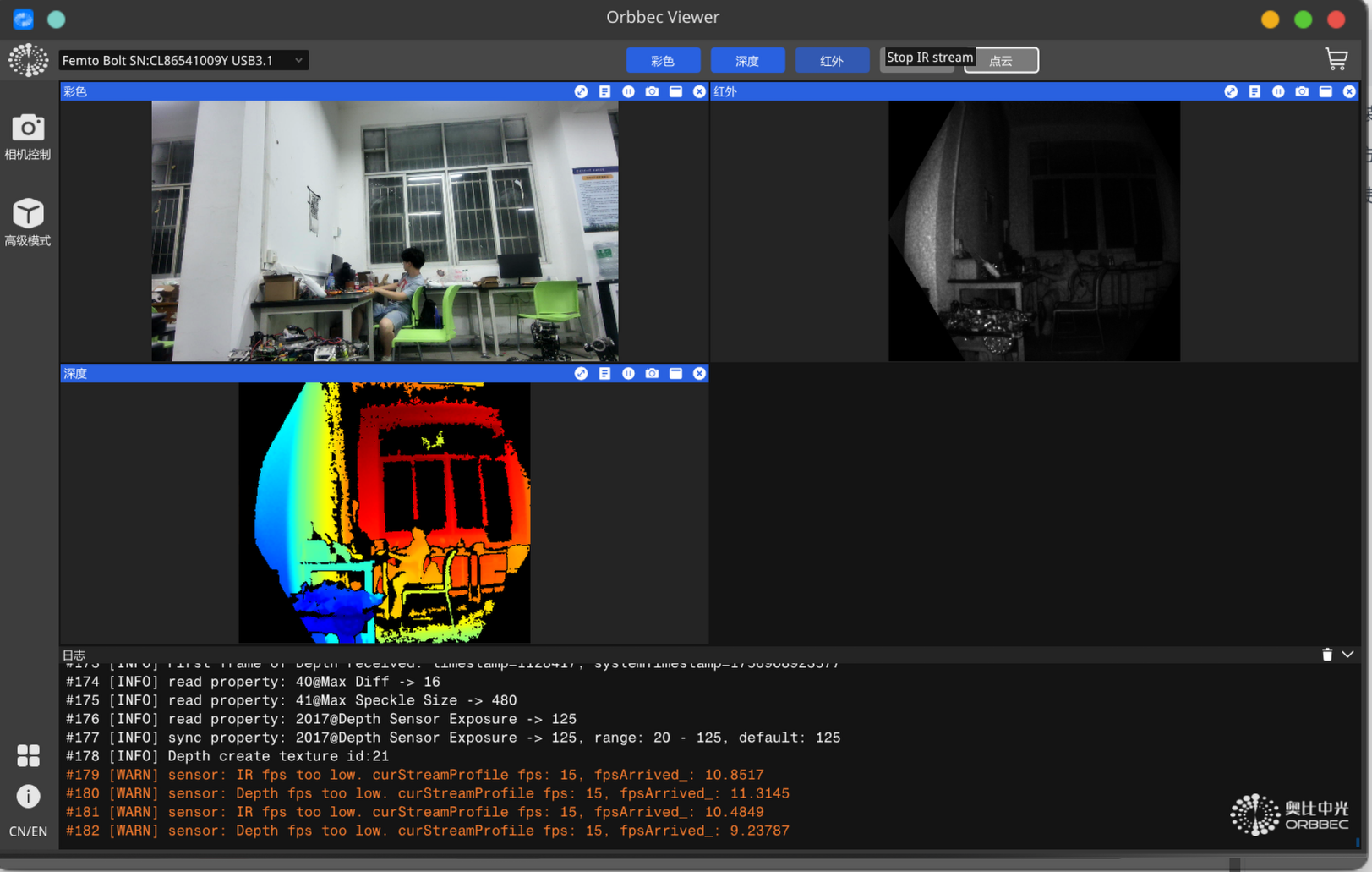
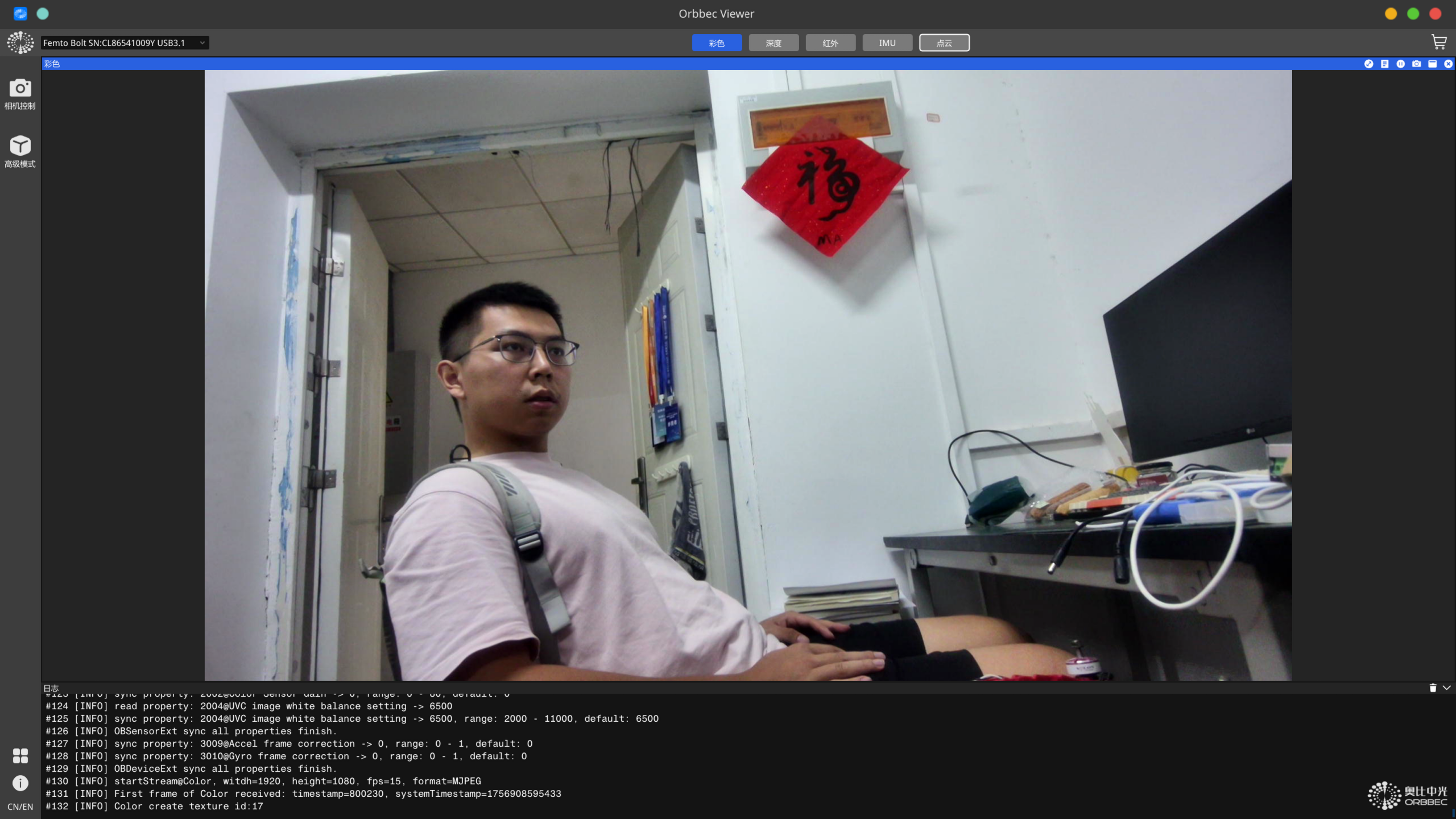
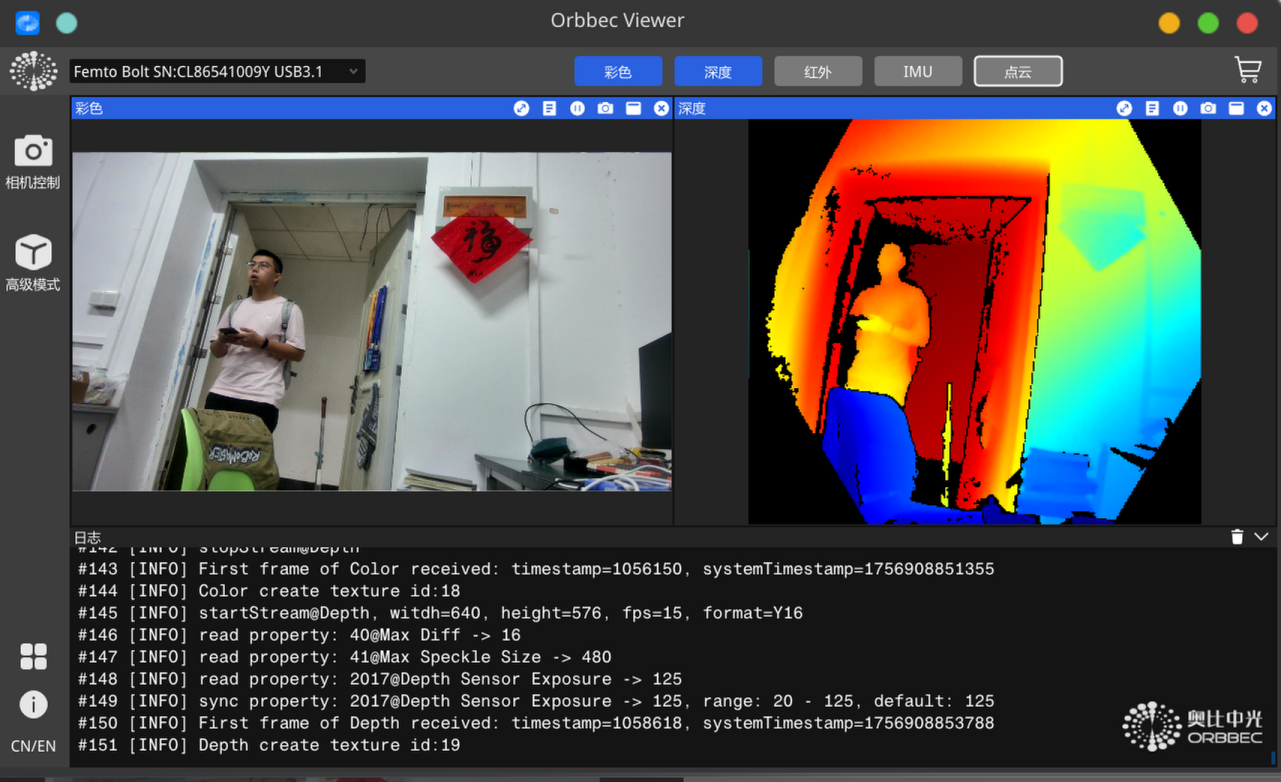
点击操作栏中的“彩色”按钮,就可以像正常相机一样捕获彩色图像(感谢懂爷友情出境)
再点击“深度”按钮,就会显示深度图像(颜色越蓝表示越近,越红表示越远)
点击“红外”按钮,可以显示红外图像
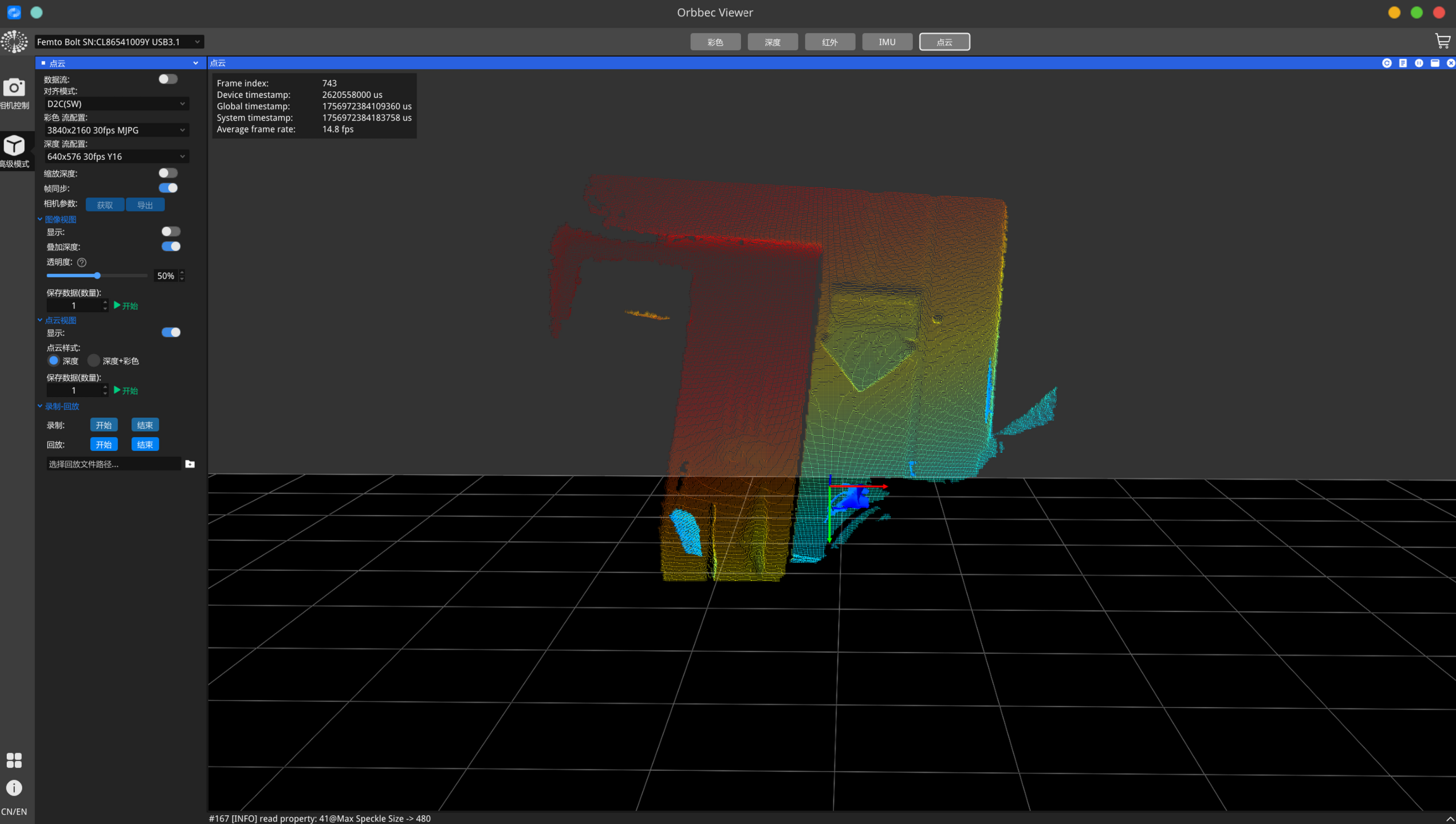
IMU的话就是显示相机内部传感器的三轴角速度和角加速度信息,这里就不展示了。而最有意思的就是这个“点云”选项:
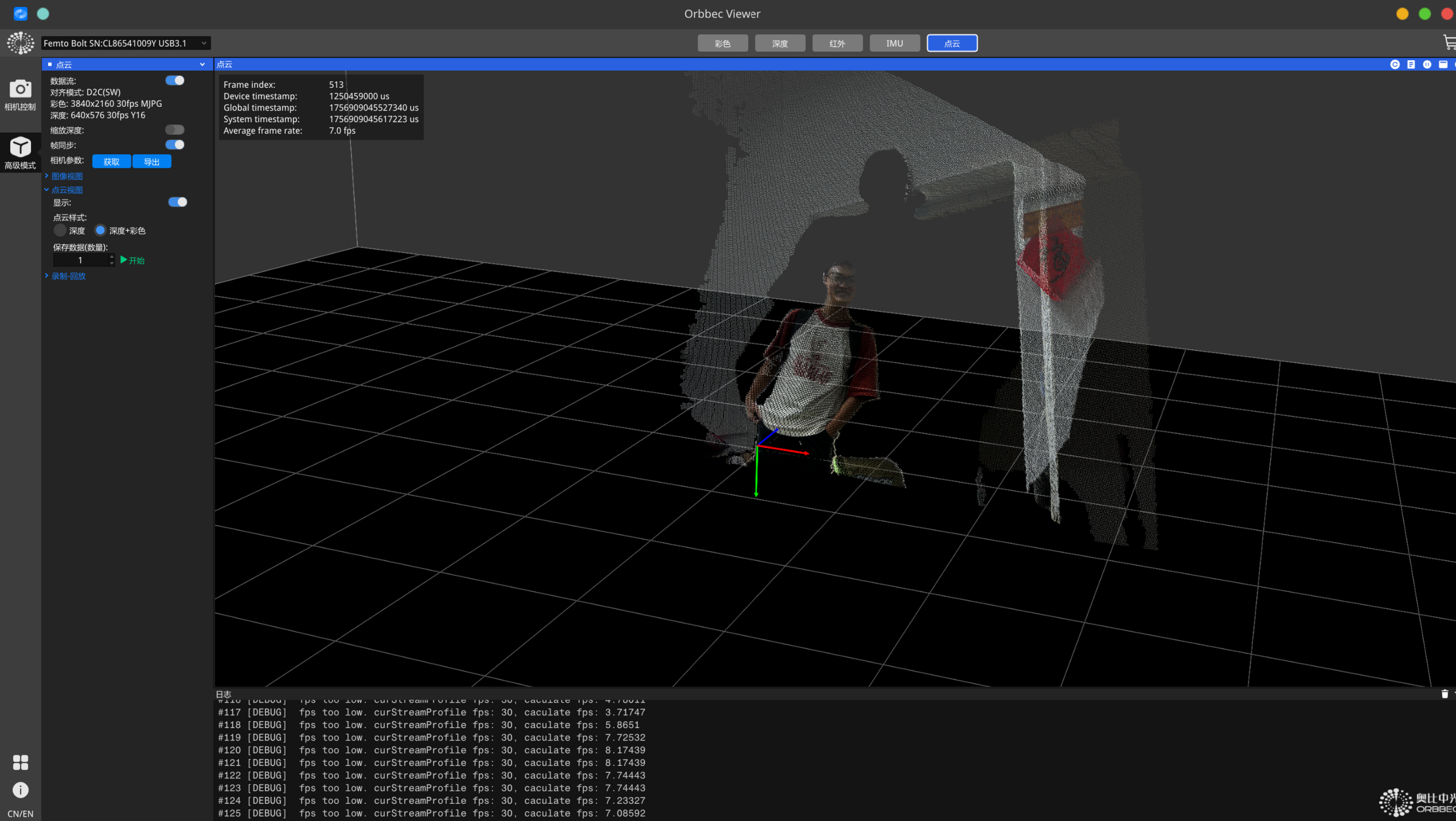
可以看到,显示了一个可拖动的3D场景,展示了当前获取到的点云信息(这里是开启了深度+彩色同时显示)。拖动一下,发现真的可以看到从摄像机视角展示的3D空间结构。
接下来我们具体来看看如何使用这款软件:
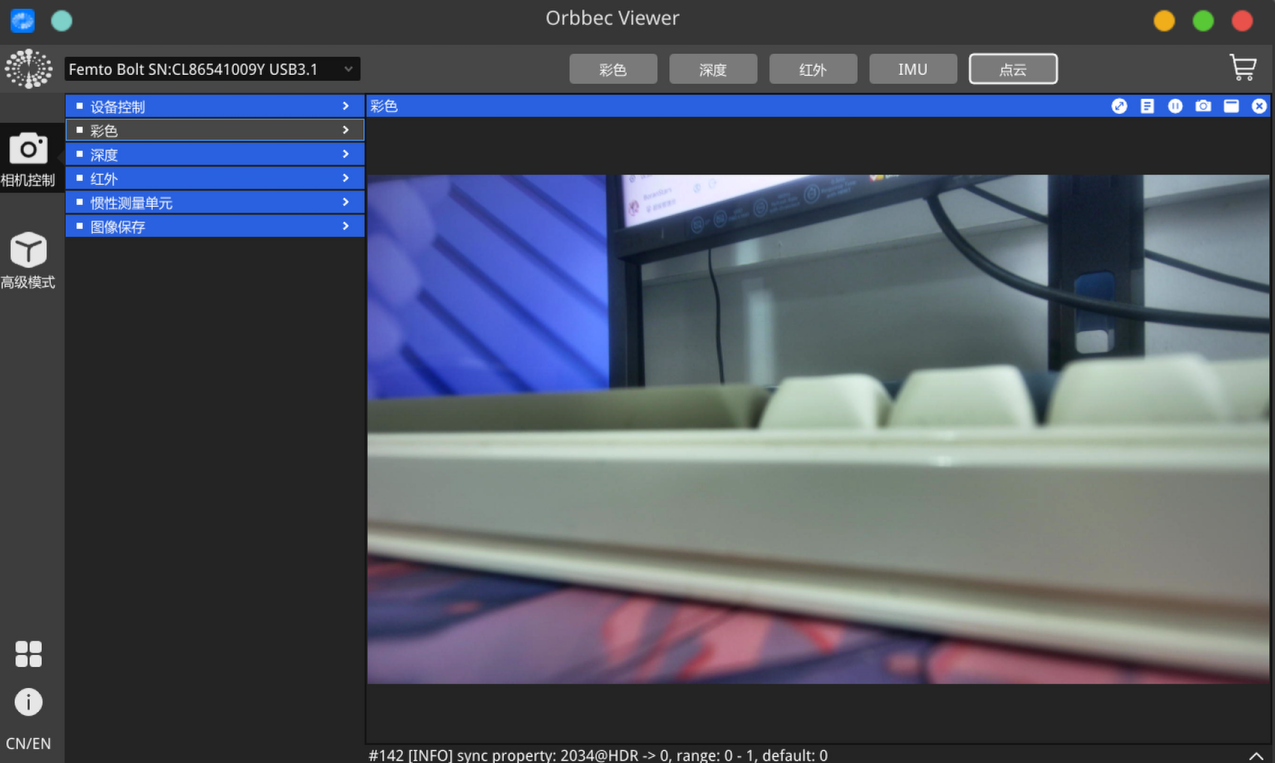
点击左侧的相机控制,在关闭数据流的时候可以对每种数据帧的捕获进行设置。
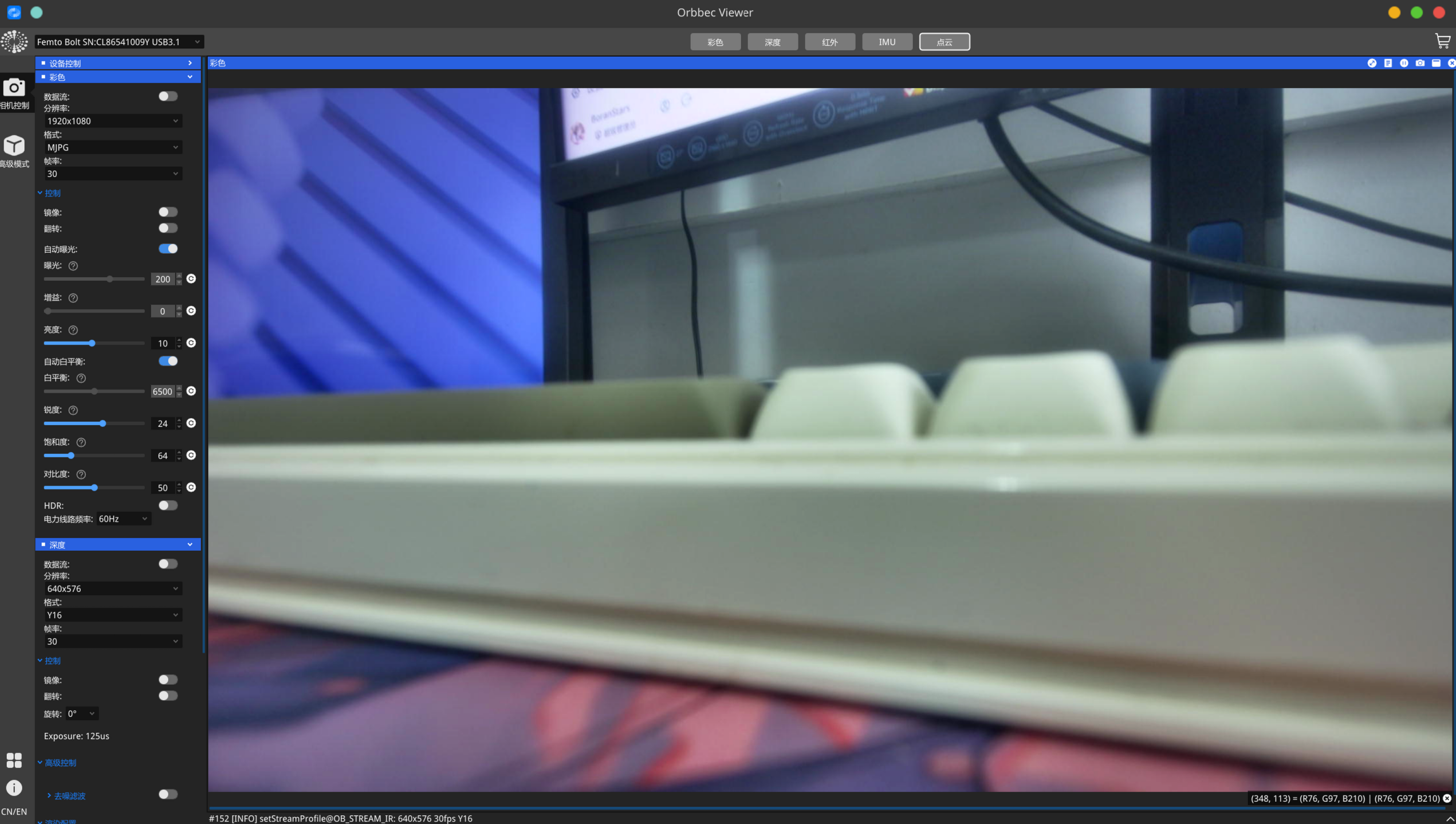
以彩色图像数据为例,这里可以对分辨率,格式,帧率,曝光,亮度,白平衡等等进行设置。
再点击高级模式,可以对点云数据的捕获进行设置
剩下还有一些功能,感兴趣的可以自行探索。
总结
本篇讲述了如何下载、安装OrbbecViewer和OrbbecSDK,并且使用OrbbecViewer软件体验了一下这款相机的使用。但是,只使用官方提供的监视软件是不够的。从下篇文章开始,我们就开始OrbbecSDK的具体学习,并且自己编写程序调用这款相机的功能来获取数据。