
传感与检测技术:霍尔传感器
今天来学习霍尔传感器
霍尔效应
金属或半导体薄片置于磁场中,当有电流流过时,在垂直于电流和磁场的方向上将产生电动势,这种物理现象称为霍尔效应。
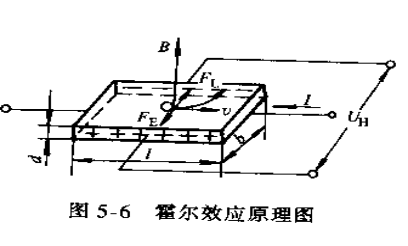
如图,在磁场B的作用下,载流导体中的电荷载流子受到洛伦兹力的作用,向一侧偏转,导致导体两侧出现电势差U_H,这个电势差称为霍尔电压。
半导体中的电子受洛伦兹力F_L的作用:
霍尔电场强度
电子又受到霍尔电场的作用力
当F_L=F_E时,电子不再偏转,有
即
而E_H 也可以写成电流密度的形式
其中\rho为电阻率,J为电流密度,I为电流,b为导体宽度,d为导体厚度。
那么有
其中R_H为霍尔系数,x为电荷的迁移率。
霍尔常数R_H等于材料的电阻率与电子迁移率的乘积,金属材料电子迁移率大,但电阻率很小;绝绝材料电阻率极高,但载流子迁移率极低;只有半导体材料适于作霍尔元件,其电阻率和载流子的迁移率都比较大。
令
则有
K_H 为灵敏度,表示在单位磁感应强度下,霍尔电压与电流的比值,这与R_H成正比,与厚度d成反比。
霍尔元件的基本特性
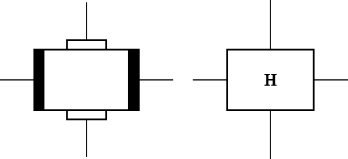
如图,这是霍尔元件在电路中的符号,左右两端为电流端,垂直方向为电压端。
基本特性
U_H 与 B 的关系
在I一定时,霍尔电压U_H与磁感应强度B成正比。

如使传感器处于非均匀磁场中,传感器的输出正比于磁感应强度,因此,对凡是能转换为磁感应强度变化的量都能进行测量,如位移、角度、转速和加速度等。
U_H 与 I 的关系
在B一定时,霍尔电压U_H与电流I成正比,因此,凡能转换为电流变化的量,均能进行测量。
U_H 与 IB 的关系
在I和B均变化时,霍尔电压U_H与IB的乘积成正比。
因此,它可以用于乘法、功率等方面的计算与测量。
主要参数
输入电阻和输出电阻
霍尔元件工作时需要加控制电流,这就需要知道控制电极间的电阻,称输入电阻。霍尔电极输出霍尔电势对外电路来说相当于一个电压源,其电源内阻即为输出电阻。
以上电阻值是在磁感应强度为零且环境温度在20℃±5℃时确定的。
额定控制电流和最大允许控制电流
当霍尔元件自身温升10℃时所流过的控制电流称为额定控制电流。以元件允许的最大温升为限制所对应的控制电流称为最大允许控制电流。
不等位电势和不等位电阻 (重点)
霍尔元件的控制电流为I_N时,若元件所处位置磁感应强度为零,则它的霍尔电势应该为零,但实际不为零。这时测得的空载霍尔电势称不等位电势。
产生不等位电势的原因主要有:
- 霍尔电极安装位置不对称或不在同一等电位面上;
- 半导体材料不均匀造成了电阻率不均匀或是几何尺寸不均匀。
- 控制电极接触不良造成控制电流不均匀分布等。
这里我们来看一下不等位电动势产生的示意图
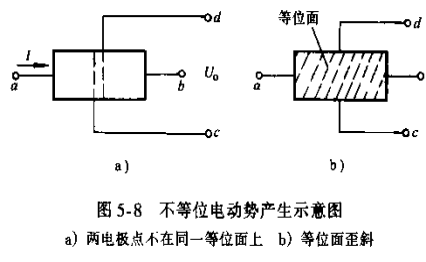
图(a) 中,两电极不在同一个等位面,因为c点靠近控制端电流流入处,电势较高,而d点靠近控制端电流流出处,电势较低,因此在c、d两点间产生了不等位电势U_{o}。
图(b) 中,等位面倾斜,c点电势高于d点电势,因此在c、d两点间也产生了不等位电势U_{o}。
不等位电势的存在会影响霍尔元件的测量精度,因此在使用霍尔元件时,应尽量减小不等位电势的影响。
不等位电阻是指在磁感应强度为零时,霍尔电极间的等效电阻。
寄生直流电势
其产生的原因有:
- 控制电极和霍尔电极与基片的连接属于金属与半导体的连接,这种连接是非完全欧姆接触时。会产生整流效应;
- 控制电流和霍尔电势都是交流时,经整流效应,它们各自都在霍尔电极之间建立直流电势。
- 两个霍尔电极焊点的不一致,造成两焊点热容量、散热状态的不一致,因而引起两电极温度不同产生温差电势,也是寄生直流电势的一部分。
寄生感应电势
当控制电流I为交变电流时,此电流形成的交变磁场在电极引线上要产生寄生感应电势。为了减小寄生感应电势,要求各电极引线尽可能短,且布线合理以减少磁交链。
霍尔电势温度系数
在一定磁感应强度和控制电流下,温度每变化1℃时,霍尔电势变化的百分率称霍尔电势温度系数。
误差和补偿
通过前面分析,我们知道霍尔元件会有误差。
零位误差
这是当控制电流为零时,霍尔电势不为零的误差
直流寄生电势引起的零位误差
霍尔元件控制电流或霍尔电压两引线电极焊点大小不等、热容量不同,或接触不良、欧姆电阻大小不等,因而引起温差电势。提高电极焊点结构上的对称性,保持电极引线接触良好,且散热条件相同,可以减小这种直流寄生电势。
寄生感应电势引起的零位误差
此部分在之前已经提到过,减小寄生感应电势的方法是缩短电极引线,并合理布线以减少磁交链。
不等位电势引起的零位误差
不等位电势与霍尔电势具有相同的数量级,有时甚至超过霍尔电势。消除不等位电势比较困难,因此实际中一般使用补偿的方法来减小不等位电势的影响。
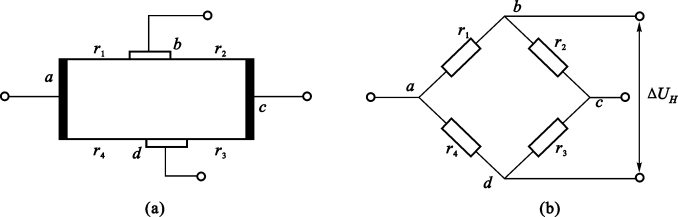
图为不等位电势的原理图。我们可以把这个电路看成一个等效电桥,如图所示。
那么产生不等位电势就可以看成是电桥不平衡引起的电压。
因此我们可以采用这样的方法来补偿不等位电势:
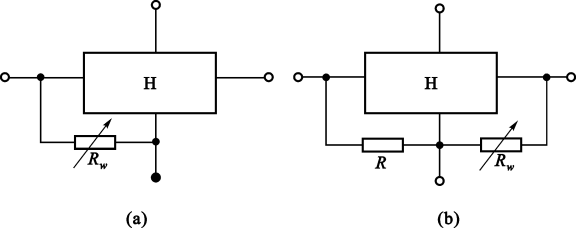
图为补偿电路原理图。
- 图(a)通过在电阻值较大的桥臂上并联电阻,调节电位器R_{w},使电桥达到平衡状态,从而消除不等位电势的影响。
- 图(b)是在两相邻桥臂上并联电阻,以增加电极等效电桥的对称性。
温度误差
一般有以下几种方法:
- 选择温度系数小的霍尔元件
- 采取恒温措施;
- 采用恒流源供电 。
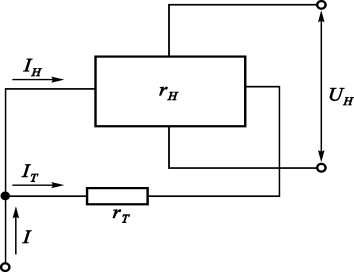
- 采用补偿电路。
电路中用一个分流电阻r_T与霍尔元件的控制电极相并联。当霍尔元件的输入电阻随温度升高而增加时,旁路分流电阻自动加强分流,减小了霍尔元件的控制电流I,从而达到补偿的目的。
集成霍尔传感器及应用
把霍尔元件和测量电路集成在一起组成集成霍尔传感器.
这类传感器具有工作频带宽、响应快、灵敏度高、无触点、体积小等优点。按其功能不同可分为两大类:开关型集成霍尔传感器和线性型集成霍尔传感器。
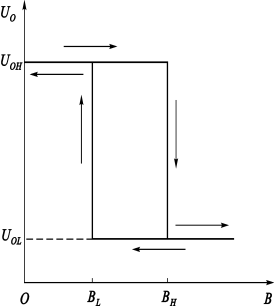
开关型集成霍尔传感器
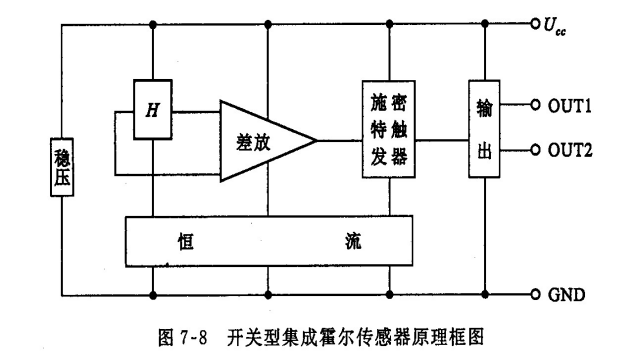
开关型集成霍尔传感器输出电平具有迟滞现象,其回差宽度\Delta B=B_{H}-B_{L}。\Delta B 越小,电平转移灵敏度就越高;反之,则输出电平抗干扰能力越强。
总结
霍尔传感器利用霍尔效应测量磁场强度,可以通过测量霍尔电压来确定磁场的变化。霍尔传感器广泛应用于位置检测、速度测量和电流感应等领域,具有非接触测量、高灵敏度和耐用性强等优点。